| Les pages à Daniel | |
| Vous êtes ici : | Accueil > |
| Les courbes de vitesse |
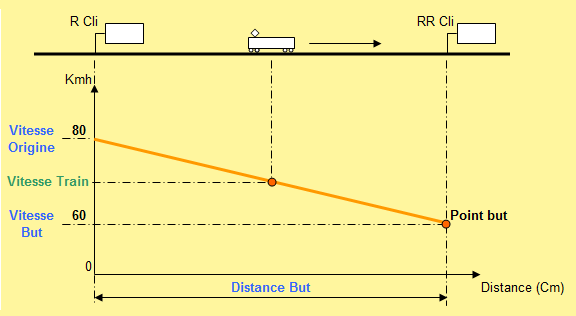
Exemple 1 : le signal aval ne présente pas une indication d'arrêt
Sur l'exemple ci-contre, notre train circule entre les signaux présentant le R Cli (annonce vitesse limite 60 kmh) et le RR Cli (exécution vitesse limite 60 kmh) La finalité est bien sûr de déterminer la vitesse du train tout au long de sa progression afin qu'à chaque instant, le pupitre :
Il est facile d'observer que les données nécessaires au calcul de la courbe orange sont :
Cette droite nous rappelle étrangement la droite de la fonction affine y=ax + b qui nous a tant |
 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Comment est calculée la distance but ? En fait, deux cas sont possibles :
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
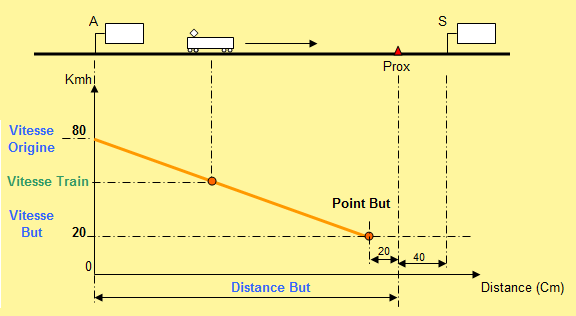
Exemple 2 : le signal aval présente une indication d'arrêt Supposons désormais que notre train se situe entre un A (avertissement) et un S (Sémaphore). La différence avec l'exemple 1 réside dans le fait que le S est un signal d'arrêt. Il est donc nécessaire de prendre des précautions pour garantir l'arrêt du train (en auto et en manuel) avant le signal. Le PC minore automatiquement la Distance But de 60 cm, selon le calcul suivant :
Dans ces conditions, nous avons l'assurance que notre train respectera la règle d'or suivante : Arriver à 20 kmh maxi sur le point Prox d'un signal présentant une indication d'arrêt |
 |
Exemple 3 : séquence complète d'arrêt |
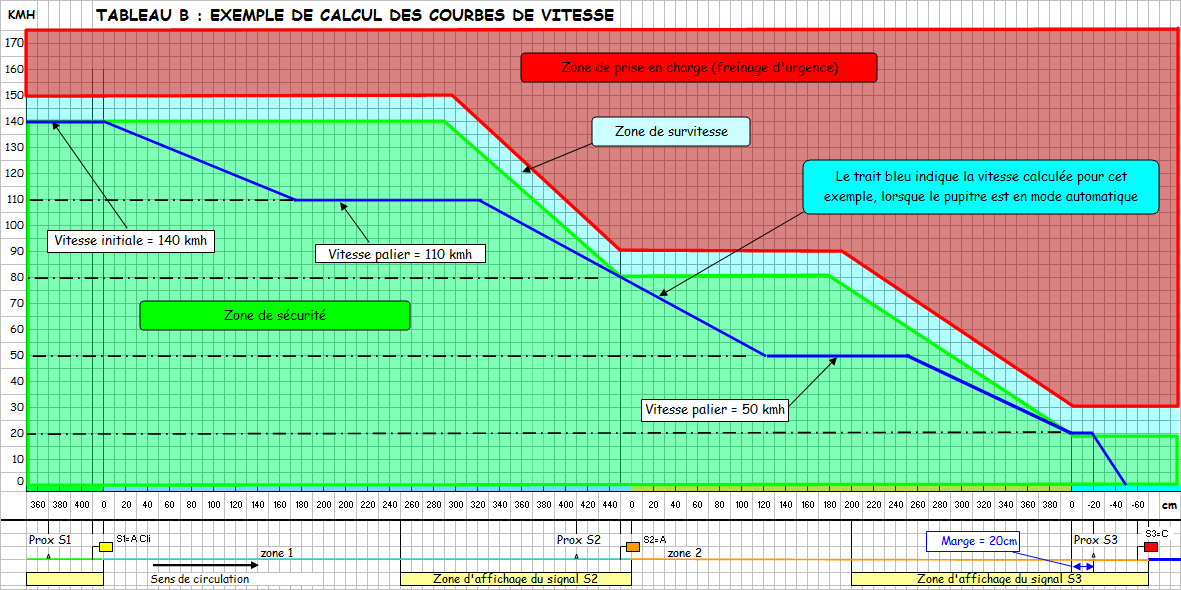
Fonctionnement
- Mode auto : la vitesse du train respecte automatiquement la courbe bleue. Nous remarquons toutefois que dans ce mode, en cas de signal d'annonce, le pupitre freine aussitôt pour rejoindre la vitesse de palier.
-
Mode manuel : la vitesse est réglée manuellement par le conducteur, à l'aide du manipulateur de traction et des freins pneumatique et rhéostatique. Cependant, le KV (contrôle de vitesse) vérifie en permanence que la vitesse du train ne pénètre pas dans la zone de survitesse (sinon allumage de la led survitesse) ni dans la zone de prise en charge (sinon ouverture du disjoncteur et déclenchement du freinage d'urgence automatiquement).
Pour mémoire, il y a survitesse dès que la vitesse maxi est dépassée. Il y a prise en charge et donc freinage d'urgence lorsque ce dépassement atteint 10 kmh.
Lors de la conception de cette installation, nous avons volontairement privilégié l'exploitation et notamment la conduite des trains. Pour cela, nous nous sommes efforcés de copier, chaque fois que cela était possible, le fonctionnement des vrais trains. Ainsi, un train peut être :
- devant un signal, qu'il devra observer (cas 1)
- juste derrière le signal (cas 2), une fois celui-ci franchi. Dès lors, le conducteur ne voit plus aucun signal et devra donc mémoriser l'indication précédemment constatée.
- dans la zone de visibilité du signal aval (cas 3)
Pour respecter cette évidence, nous avons affecté à chaque signal une distance de visibilité spécifique, laquelle dépend principalement des conditions géographiques (courbe, alignement, etc...)
Concrètement, dès le franchissement d'un signal, son indication disparait sur l'afficheur du pupitre (et sur le visualisateur s'il s'agit du pupitre 1). Ces informations ne réapparaîtront que lorsque le train atteindra la distance de visibilité du signal aval. Cette particularité apporte un piment certain lors de la conduite des trains, d'autant plus que le dispositif de contrôle de vitesse (KVB) veille en permanence.
 |
||
Cas 1 |
Cas 2 |
Cas 3 |
 |
 |
 |
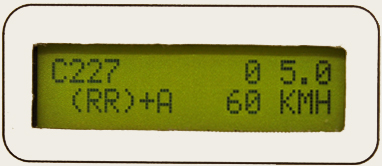
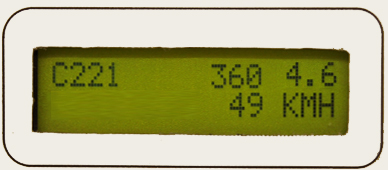
Notre train aborde le C227. L'afficheur du pupitre concerné précise l'indication présentée. Cela permet de respecter scrupuleusement le 60 kmh imposé.
|
Nous venons de franchir le C227. Aussitôt l'indication disparait de l'afficheur car le C227 n'est plus visible et que nous ne sommes pas encore dans la zone de visibilité du signal aval (C221). Il nous reste 3,60m à parcourir. |
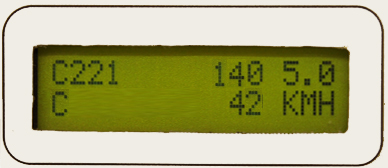
Arrivés à 1,40m du C221, l'indication portée par ce signal (C) s'affiche, attestant que nous sommes dans la zone de visibilité de ce signal. |
 |
 |
 |
Sur l'écran mural du pupitre 1, nous retrouvons les mêmes informations. Notez l'allumage au fixe de la lampe LSSF, le dernier signal franchi auparavant étant fermé. |
Une fois le C227 franchi, celui-ci n'est plus visible .... tandis que le suivant ne l'est pas encore ! Le visualisateur du boîtier KVB affiche 00 car nous arrivons sur un signal d'arrêt dans 360 cm. |
Nous sommes désormais dans la zone de visibilité du C221, toujours fermé. Nous allons devoir freiner pour arriver à 20 kmh maxi sur le point Prox qui sera signalé par 000 dans le visualisateur vert du boîtier KVB.. |
Les courbes ne sont recalculées que dans les deux cas suivants :
- ponctuellement lors du franchissement d'un signal
- au fil de l'eau dès lors que le train se trouve dans la zone de visibilité du signal aval.
Nous avons vu qu'à chaque signal est associée une distance de visibilité. En conséquence, dès que notre train se trouve dans la distance de visibilité du signal aval, si ce dernier venait à s'ouvrir, le train pourrait reprendre la vitesse. En mode auto, une temporisation de 2 secondes a toutefois été créée pour simuler "le temps de réaction" du conducteur...
La conduite est conforme à celle des vrais trains sur une ligne SNCF dont tous les signaux seraient munis de KVB (Contrôle de Vitesse par Balises) et équipés de balises de réouverture. (Le grand luxe !). Dans notre cas, cette possibilité de reprise de vitesse assouplit considérablement la conduite et fluidifie le trafic...
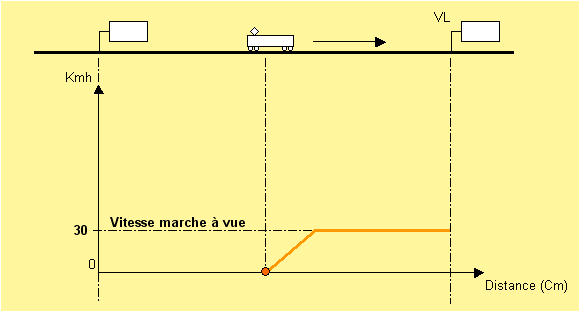
La vitesse de départ d'un train Après tout arrêt prolongé ou accidentel, un train réel est tenu de rouler en marche à vue (30 kmh maxi) tant qu'il n'a pas franchi un premier signal. En modélisme, il nous semble peu réaliste de voir un engin moteur franchir à 60 kmh son premier signal, à la suite de sa mise en voie ou après changement de sens de circulation. Pour cette raison, LogiDCC limite désormais à 30 kmh la vitesse de départ d'un train, après changement de sens ou mise en voie. Que le pupitre concerné soit en mode automatique ou en mode manuel, cette vitesse est à respecter jusqu'au premier signal franchi. Le KVB veille ... Bien entendu, cette mesure ne s'applique pas lors d'un arrêt normal. |
|
 |